LTI 시스템의 frequency response에 대해 알아보고 phase distortion, group delay 개념을 살펴봅시다.
LTI 시스템의 frequency response
시스템의 주파수 응답 (frequency response)이 선형 시불변 시스템 (LTI system)을 특징짓듯이, 임펄스 응답 (impulse response)을 알면 LTI system 전체를 이해할 수 있게 됩니다.

- LTI system: linearity와 time-invariant 속성을 가진 시스템
- impulse response: 시간 영역에서 LTI 시스템의 입출력 성질을 보여줌, 입력으로 임펄스가 들어왔을 때 시스템의 출력
- frequency response: 주파수 영역에서 LTI 시스템의 입출력 성질을 보여줌
- transfer function: 복소주파수 영역에서 LTI 시스템의 입출력 성질을 보여줌
임펄스 응답의 z변환은
주파수 응답
입력 신호의 DTFT 결과와 주파수 응답이 주어졌다고 가정해봅시다. 각각 phase와 magnitude 정보를 가지고 있는데 이 값을 활용하여 LTI 시스템 출력의 magnitude와 phase를 구해줄 수 있습니다. 이렇게 magnitude와 phase response를 기반으로 LTI 시스템을 모델링하고 분석할 수 있습니다.
Phase Ambiguity (위상 모호성)와 Principle value
주파수 응답에서 phase는 주파수
앞서 말했듯이, phase는 주기적인 성질을 갖고 있기 때문에 위상이 0부터
- phase wrap-around (wrapping): 일정 범위를 벗어나면 다시 해당 범위 내로 돌아가도록 제한된 범위에서 위상 표현
- phase unwrapping: 위상 값을 보정하여 다시 연속적인 위상 곡선을 얻는 과정
phase의 principle value는
그림을 통해 다시 한번 살펴 보겠습니다. 컴퓨터가 처리할 수 있는 이산적인 값으로 나타내주기 위해, 연속적인 phase 정보
Group Delay
group delay는 phase response를 주파수
group delay 값이 상수라는 것은 모든 주파수가 똑같은 delay를 가지는 것 (phase가 linear하거나 0)을 의미합니다. 다시 말해, 여러 신호들의 입출력 순서는 똑같고 그저 phase만 shift 된 형태로 나타나게 됩니다. 반대로, group delay 값이 일정하지 않고 계속 변화한다면, nonlinear한 속성으로 인해 시스템 분석이 어려워집니다.
3개의 신호의 phase spectrum과 group delay를 나타낸 그림입니다. 노란색 signal을 보면 phase가
phase distortion과 delay
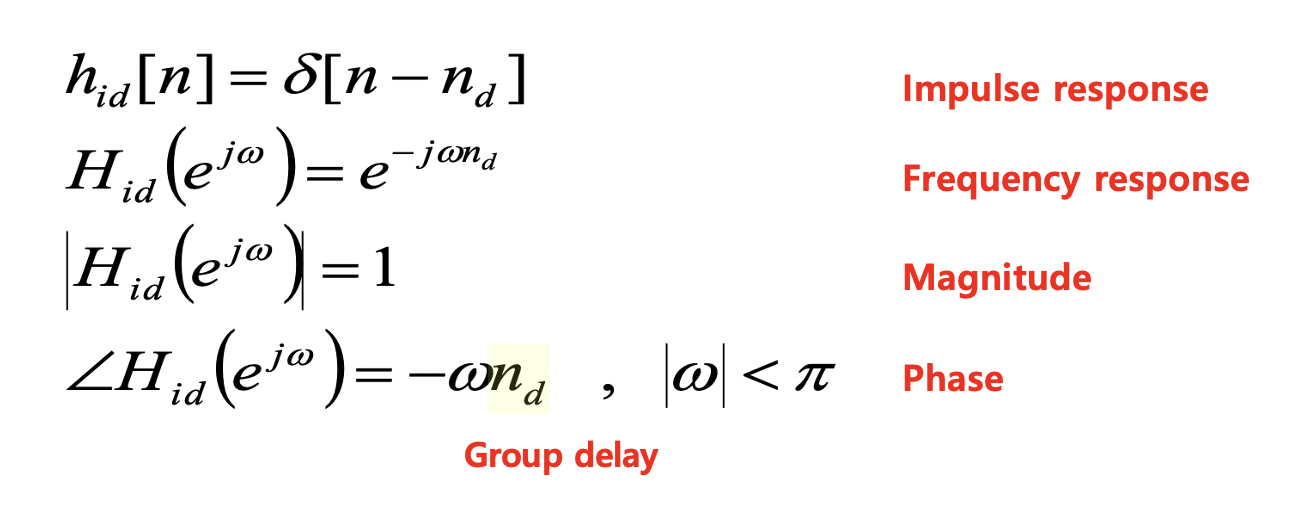
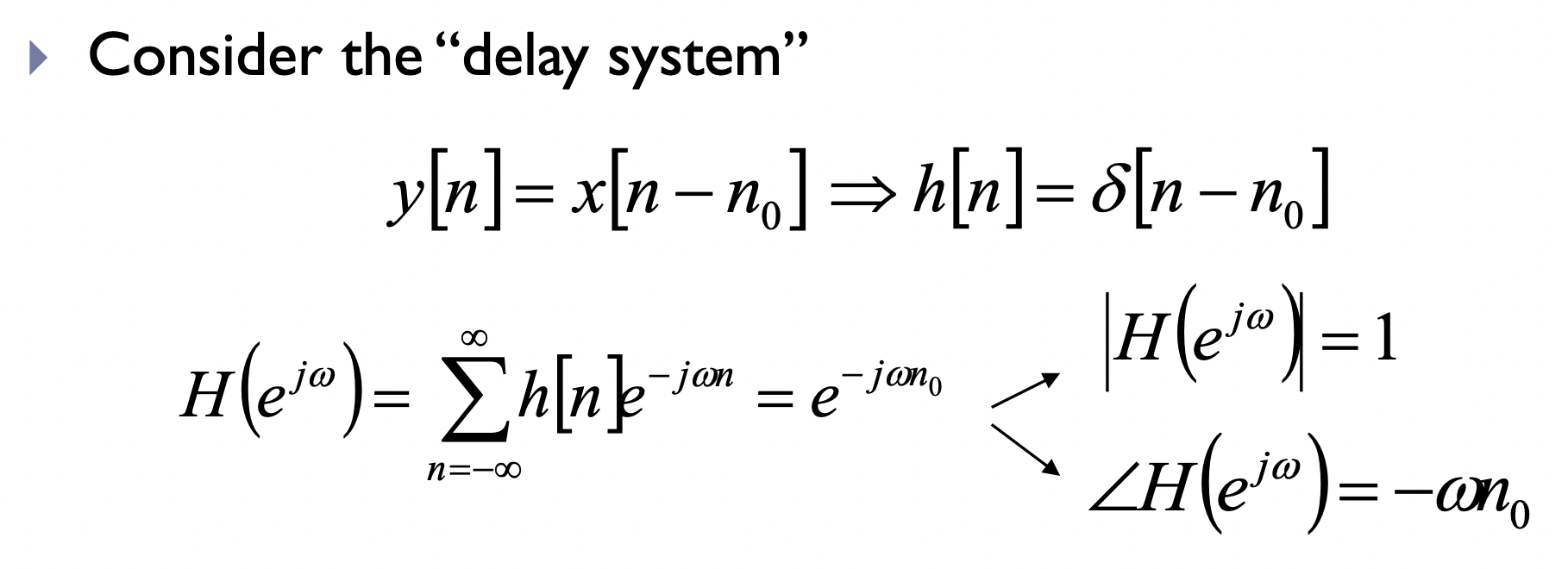
Ideal delay system 예시를 살펴보겠습니다. group delay가
* zero phase
만약 phase 값이 0으로 정의된다면, phase를 주파수로 미분하여 negative를 취한 값인 group delay도 0 (신호의 시간 지연 X)이 되기 때문에 임펄스 응답은
+) 어떤 시점을 기준으로 미래 값을 참조하고 있다면 non-causal 함
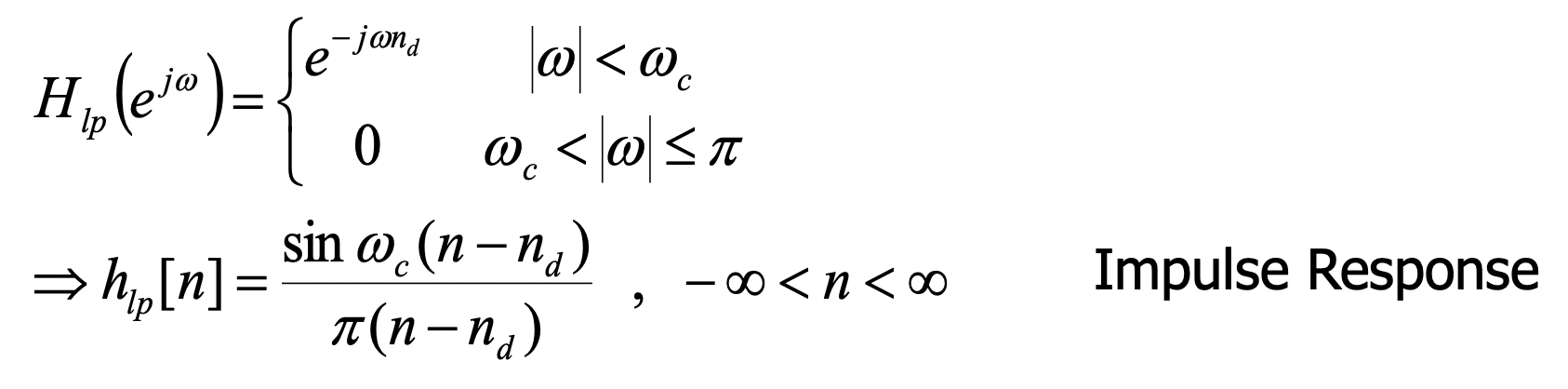
* linear phase
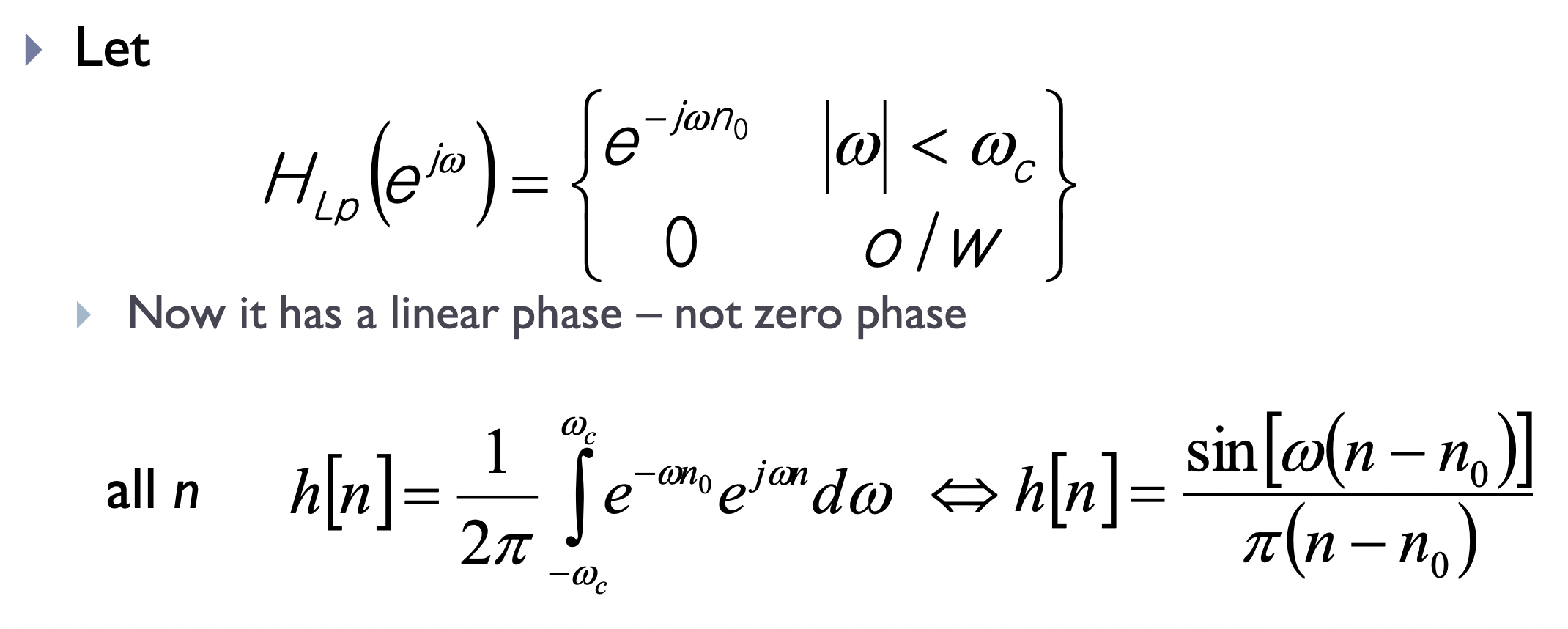
이번에는 time delay가
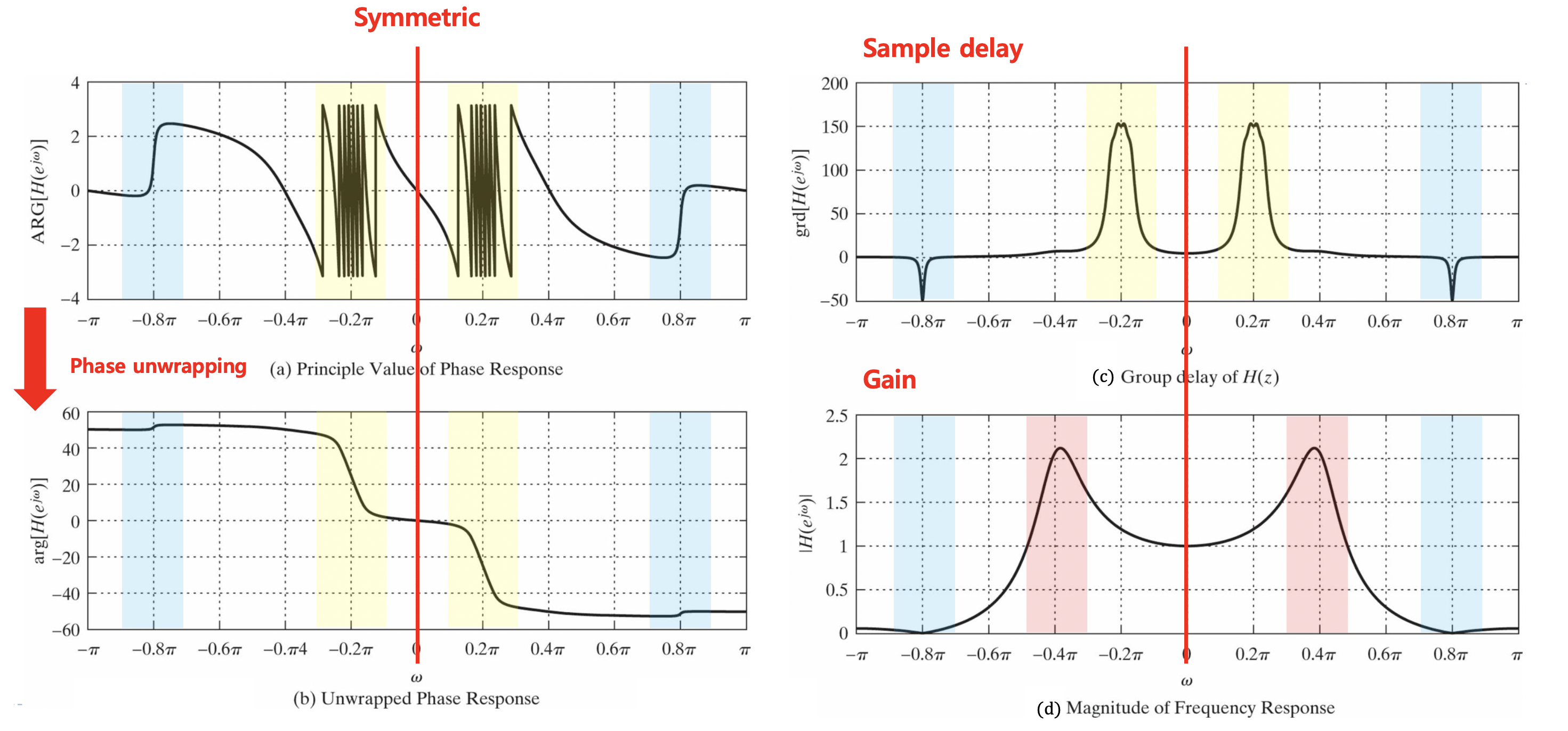
Group delay가 신호에 어떤 영향을 미치는지 그림을 통해 알아보겠습니다. (a)는 Phase response의 principle value를 나타낸 것으로, 이를 unwrapping 시켜주면 일정한 범위로 매핑되어있던 phase 값이 그림 (b)와 같이 연속적인 형태로 나오게 됩니다. (a), (b)를 비교해보면 전체적으로 phase가 빠르게 변하거나 거의 변화가 없이 일정한 양상이 비슷하게 나타나는 걸 확인할 수 있습니다. 또한, (d)의 gain이 0이 되는 지점 (
(c) group delay 그림을 보면,
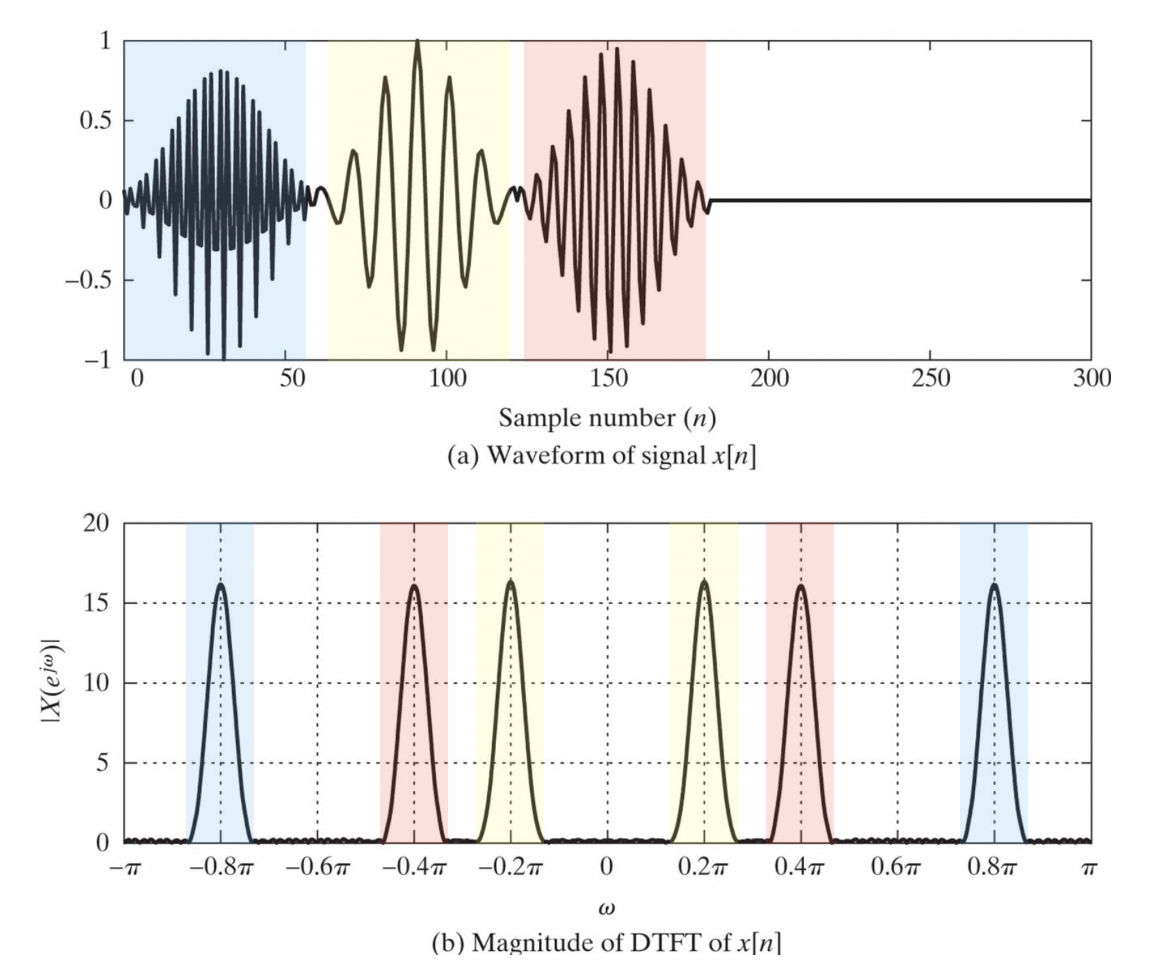
3개의 신호 (정확히는 여러 주파수 신호로 이루어져 있겠지만..)를 DTFT한 결과가
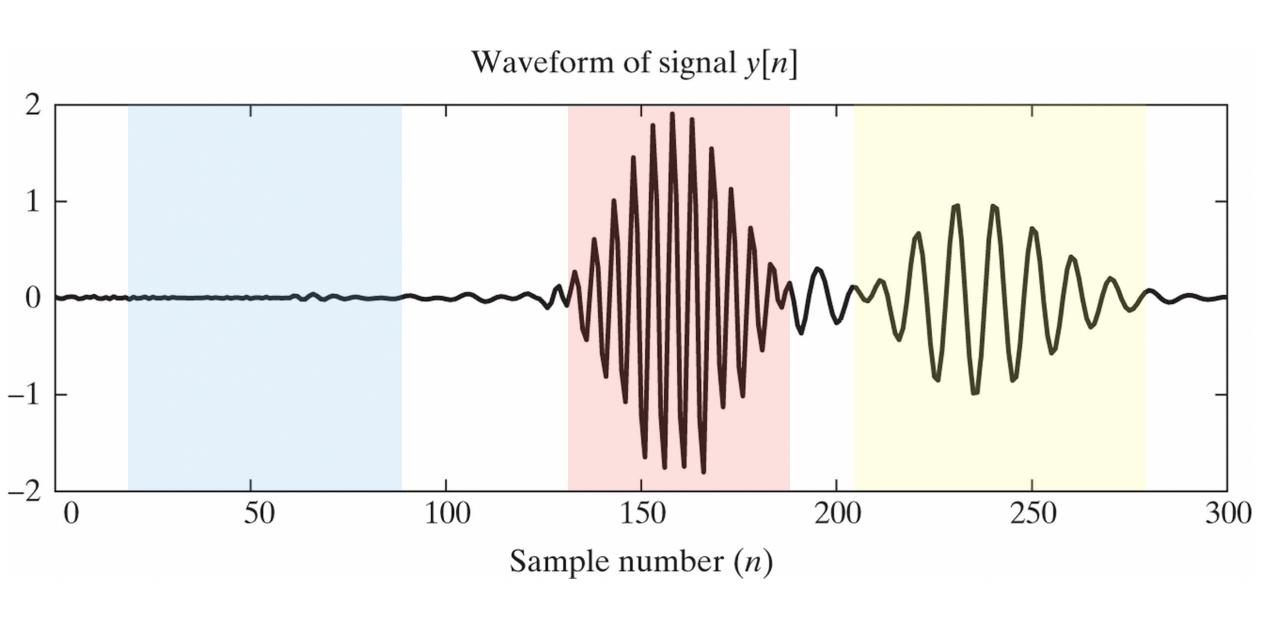
group delay와 gain을 적용하면 위와 같이 나오게 됩니다.
GIST 신종원 교수님 '디지털신호처리' 수업 자료를 바탕으로 쓴 글입니다.
'연구 노트 > 디지털신호처리' 카테고리의 다른 글
| 다운샘플링 시 Aliasing 현상 Spectrogram에서 관찰하기 (0) | 2024.04.21 |
|---|---|
| 고윳값 (eigenvalue), 고유 함수 (eigenfunction) 개념으로 LTI 시스템 해석하기 (0) | 2024.04.18 |
| 업샘플링 (Upsampling) (1) | 2024.04.10 |
| 다운샘플링 (Downsampling) (0) | 2024.04.10 |
| 샘플링 이론 (Sampling Theorem) 알아보기 (0) | 2024.04.08 |



